
Instituto Superior Técnico - http://farm4.static.flickr.com/3016/2784406274_daaa599fce.jpg


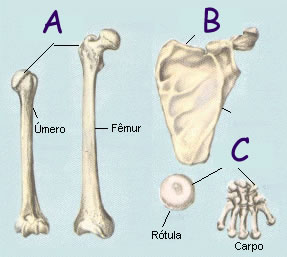
Ossos (http://www.sobiologia.com.br/figuras/Corpo/tipos_ossos.jpg)

O estudo dos ossos chama-se osteologia.
 Articulação do cotovelo (http://www.auladeanatomia.com/artrologia/cotovelo2.jpg)
Articulação do cotovelo (http://www.auladeanatomia.com/artrologia/cotovelo2.jpg)

Experiência 1
Experiência 1
Experiência 2



A seringa de baixo tem água e lubrificante, enquanto que a de cima tem apenas água.
 A tabela poderá ser vista em tamanho maior no site https://sites.google.com/site/jesacara/
A tabela poderá ser vista em tamanho maior no site https://sites.google.com/site/jesacara/


Também fizemos alguns vídeos:

Como a tabela não se vê muito bem, ela poderá ser consultada no site https://sites.google.com/site/jesacara/

http://upload.wikimedia.org/wikipedia/commons/a/ac/Arm_muscles_front_deep.png















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}